Software Projects
These projects are all primarily software-based.
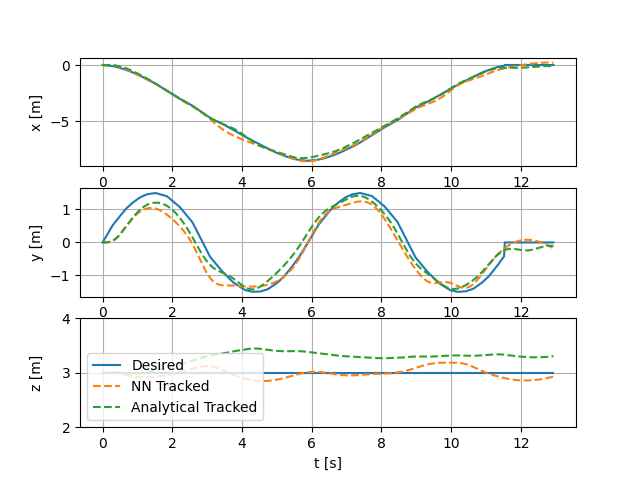
MPPI Control for Learned Quad Dynamics
For our ESE 650 final project, we integrated a learned dynamics model into an MPPI controller pipeline leveraging the gym-pybullet-drones simulator. For more information, click the image.

Autonomous Drone Navigation
In these experiments, we wrote software to allow a small drone to autonomously navigate through a maze-like environment with the help of a Vicon system. To do this, we combined our geometric non-linear controller, A* path planner, and minimum snap trajectory generator. To learn more and see a video of the drone flying, click the image to the right.
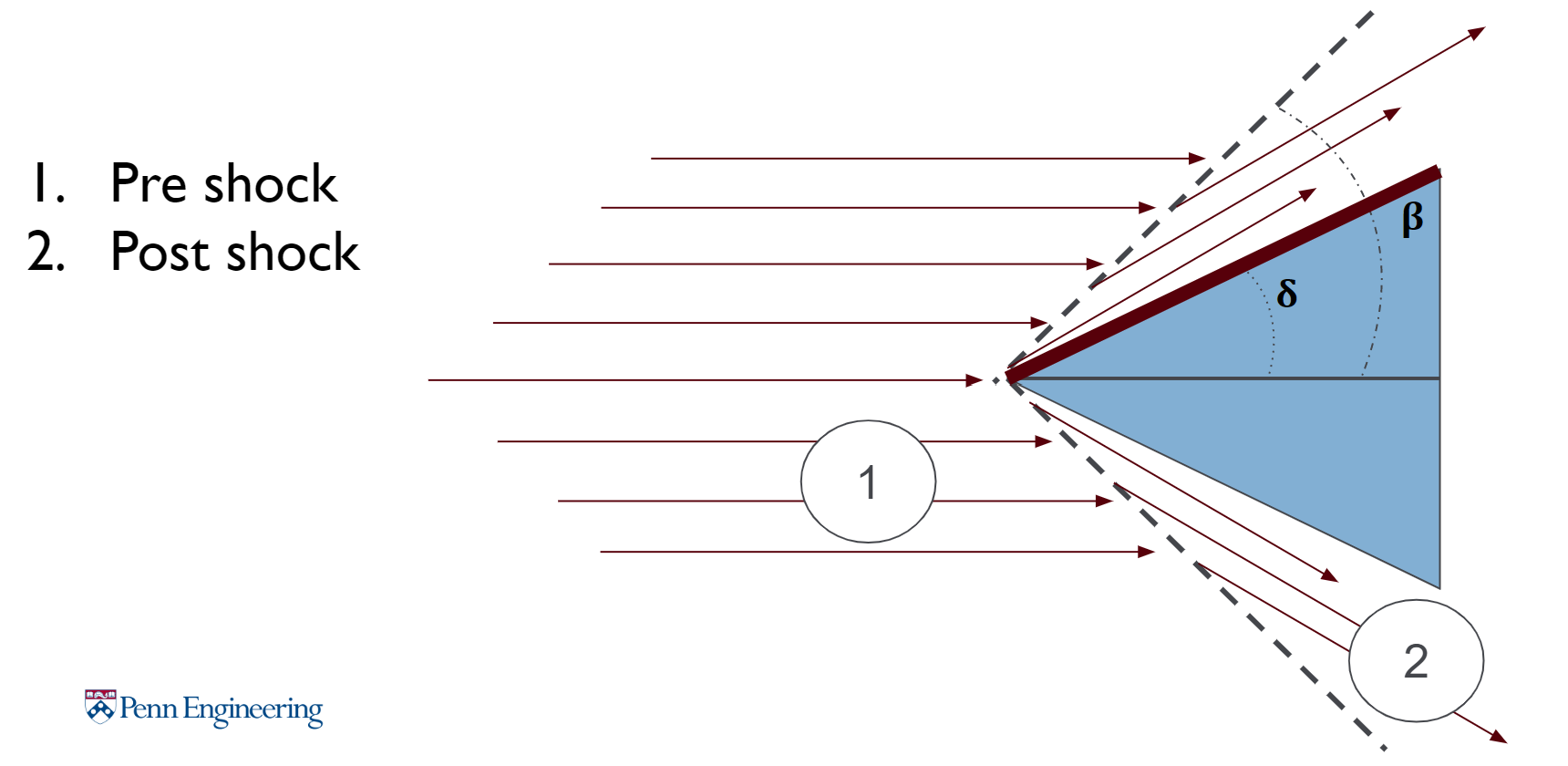
Euler Equations with Physics Informed ML
For our ENM531 final project, Keshav and I used a data-driven approach, implementing physics-informed neural networks to try and solve the Euler equations for an Oblique shock wave. For more information and results, click the image!

Pick and Place Challenge
For the final project of MEAM 520, we built on the existing software library we had created throughout the semester. The challenge was to program the Franka Panda arms to compete in a pick-and-place challenge. For more info and to see us compete in the playoffs click the link below!


Data-Driven Impact Modeling
Building off of the work I did during the summer of 2020, I decided to return to the topic of impact modeling. This time we took a data driven approach using techniques learned throughout ENM 360. Click the image to learn more!