Grand Theft Autonomous (Champions)
For the final project in mechatronics (MEAM 510) the class competed in teams to build robots which competed in a partner challenge. Points could be scored by controlling cans and beacons on your side of the field and there was a doubling zone towards the center of the map. Points could also be earned for certain autonomous functions. During the competiton, the driver of the robot could only see their side of the field via a zoom livestream, and had no visual data for the opponents side. My partners were Justin Duhamel and Oscar Tinney. Below is a video of our Robot winning the single elimination bracket on championship Sunday.
Rules Explanation: 2:20
First Round: 30:38
Semifinals: 1:12:03
Grand Finals Game 1: 1:39:21
Grand Finals Game 2: 1:46:30
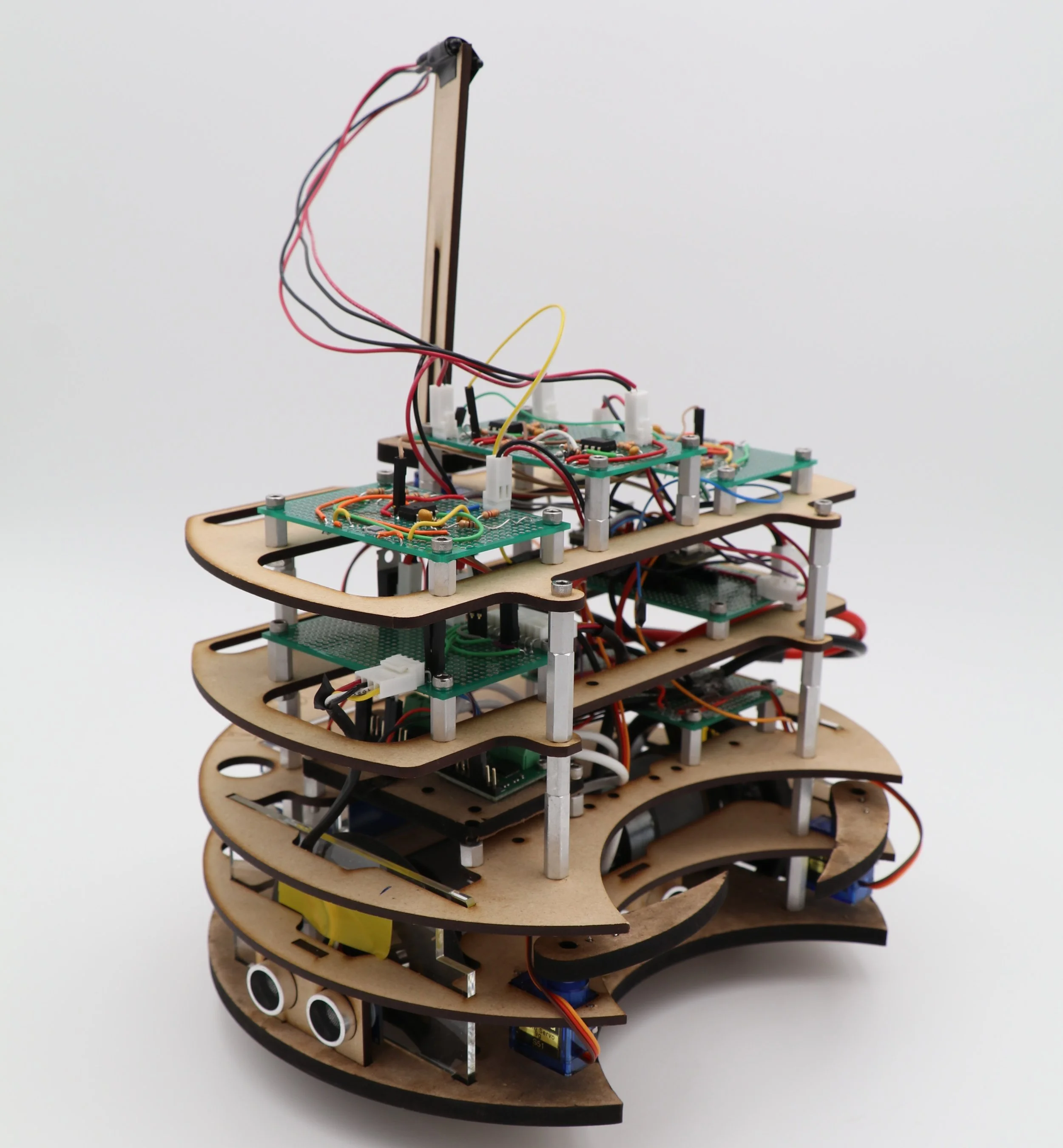
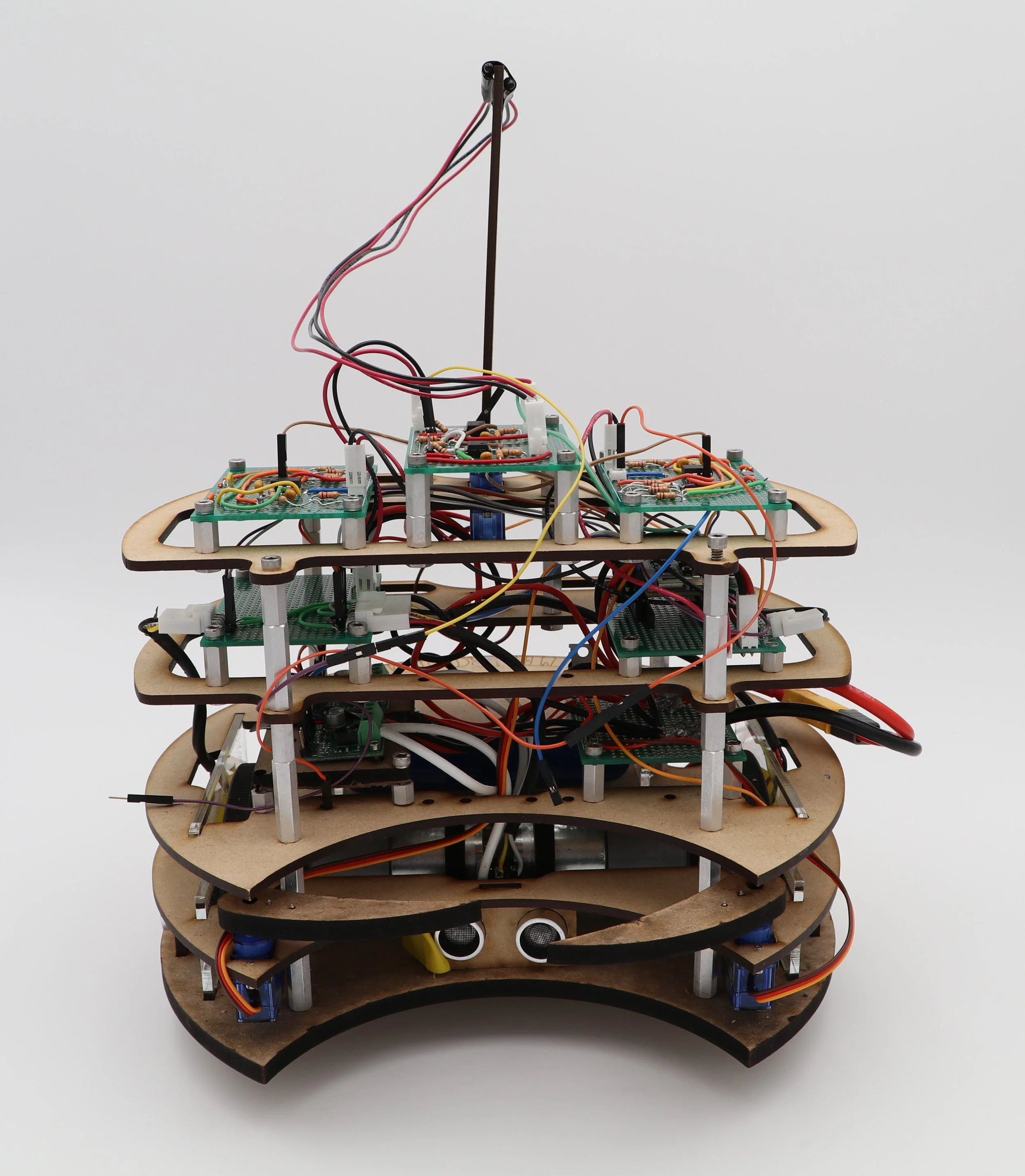
If you are interested in watching some of our qualifying matches you can check out the first hour and half of this video. Below I have included some images of our robot and from the competition as well as our final report, CAD assembly, and a link to our repository.
Key Features
Autonomous
Wall Following (utilizing USS sensors)
Beacon Tracking (navigate to a beacon transmitting an IR signal at a certain frequency)
Can Finding (using the Vive system, navigate to given coordinates which are user-chosen or received from a can broadcast)
Other
Remote control of the car, gripper, and autonomous features using an Xbox One controller
Map playing field from information broadcasted over UDP